概 述
流動注射分析技術(shù)可對液體樣品進(jìn)行快速測定,具有重現(xiàn)性好、自動化程度高等優(yōu)點 ,在農(nóng)業(yè)、環(huán)保、醫(yī)藥、食品、冶金等*域得到廣泛應(yīng)用
[ 1] 。
在使用
蠕動泵做驅(qū)動裝置的流動注射分析系統(tǒng)中,
蠕動泵的運行狀況 , 特別是泵速的穩(wěn)定性, 直接影響著系統(tǒng)的測量精度。步進(jìn)電機(jī)運行速度及運行方向容易控制, 起動和停止迅速, 步距精確, 適合作
蠕動泵的驅(qū)動裝置。我們設(shè)計了一種步進(jìn)電機(jī)控制電路 ,可以提高蠕動泵泵速的穩(wěn)定性,減少脈動對測量精度的影響, 取代傳統(tǒng)可逆電機(jī)控制電路和步進(jìn)電機(jī)環(huán)形分配器控制電路
[ 2] 。
2 控制原理
當(dāng)步進(jìn)電機(jī)運行方式確定之后, 步進(jìn)電機(jī)的轉(zhuǎn)速只和步進(jìn)脈沖頻率有關(guān) ,步進(jìn)脈沖頻率越高 ,步進(jìn)電機(jī)的轉(zhuǎn)速越高。因此, 控制步進(jìn)脈沖的頻率就可以控制步進(jìn)電機(jī)的轉(zhuǎn)速。以往一般采用定時器或者軟件分頻的方法控制脈沖的頻率, 其脈沖線性度差 , 而且頻率越高, 誤差越大。
利用集成電路AD654 與可編程邏輯器件(GAL)

配合,可產(chǎn)生頻率連續(xù)可調(diào)的步進(jìn)脈沖信號,實現(xiàn)步進(jìn)電機(jī)的無級調(diào)速。
2 .1 V/F 集成電路芯片 AD654
AD654 是一種將電壓信號轉(zhuǎn)換為頻率輸出(V/ F)的集成電路芯片 , 具有較低的功耗 , 靜態(tài)時只需要 2mA 的電流。電路結(jié)構(gòu)和引腳功能如圖 1 所示。它的內(nèi)部包含一個輸入放大器、一個精確的振蕩器系統(tǒng)和一個具有較大輸出電流的電壓輸出口。
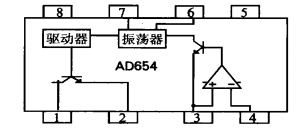
圖 1 AD654 集成電路結(jié)構(gòu)圖
管腳號及功能:1.可變頻率輸出口 2.邏輯公共端 3.RC 振蕩器的電阻接入端 4.電壓輸入端 5.電源負(fù)端 6 , 7. RC 振蕩器的電容輸入端 8.電源正端
AD654 能較好地適應(yīng)各種供電系統(tǒng), 電源從 5V 到 36V ,或者 ±5 ~ ±18V 都可以 , 便于在各種系統(tǒng)中應(yīng)用。由于輸入放大器的低溫度漂移(一般在 4μV/ ℃)和高達(dá) 250MΨ的輸入阻抗 ,所以它能夠接
|
收熱電偶或者應(yīng)變儀之類直接傳送過來的小信號。 |
時只有 0 .03 %, 溫度系數(shù)為±50mg/L/ ℃。 |
|
與其他大多數(shù)V/F 變換器不同 ,AD654 提供的是方 |
2 .2 速度控制 |
|
|
波輸出,能夠驅(qū)動 11 個 TTL 負(fù)載或光電耦合器等負(fù) |
控制電路如圖 2 所示。電阻R2 與電位器W1 串 |
|
載。只需要簡單的外圍 RC 電路就能實現(xiàn)寬范圍的 |
聯(lián)后與電容 C1 |
組成 AD654 的 RC 振蕩系統(tǒng)。其 1 |
|
頻率輸出(**高可達(dá) 500kHz), 線性度誤差在 250kHz |
腳是集電極開路, 外接上拉電阻 R3 。 |
.
AD654 輸出脈沖的頻率 f 可按下面的公式計算:

其中 , VIN為 AD654 的4 腳輸入電壓。
從式(1)可以看出, 改變 AD654 輸出脈沖頻率的辦法有三種, 一是改變 4 腳的外部輸入電壓 VIN , 二是改變電位器 W1 的阻值, 三是改變電容 C1 的電容量。因此輸出固定脈沖時, 需要事先設(shè)定好這三個參數(shù);輸出線性變化脈沖時 ,只需要連續(xù)改變其中一個參數(shù)或者多個參數(shù)。
在圖 2 所示控制電路中 ,根據(jù)實際需要的轉(zhuǎn)速范圍 ,事先調(diào)整好電位器 W1 和電容 C1 的參數(shù) , 使 AD654 的輸出脈沖頻率與輸入電壓 VIN 成正比 。為了接收上位計算機(jī)發(fā)出的電流信號(0 ~ 20mA), 在電路中設(shè)置了電阻 R3 ,這樣就能夠在AD654 的 4 腳得到連續(xù)變化的輸入電壓, 實現(xiàn)步進(jìn)脈沖的連續(xù)輸出,進(jìn)行無級調(diào)速。如果上位計算機(jī)發(fā)來的是電壓信號 ,則不需要設(shè)置電阻 R1 ;如果是手動調(diào)節(jié), 可通過外接一個調(diào)節(jié)電位器來改變 AD654 的輸入電壓 , 實現(xiàn)速度調(diào)節(jié)。
2 .3 可編程邏輯器件的應(yīng)用
蠕動泵控制電路中使用的是一臺額定電壓為

24V 、額定電流為 4A 的三相反應(yīng)式步進(jìn)電機(jī) 。這種步進(jìn)電機(jī)的工作方式有三種 ,即單三拍、雙三拍和六拍。步進(jìn)電機(jī)在六拍工作方式時, 具有較好的平滑性 ,能產(chǎn)生較大的旋轉(zhuǎn)力矩 ,比其他兩種工作方式有更好的高頻性能
[ 3] 。因此控制電路中步進(jìn)電機(jī)采用六拍工作方式。
步進(jìn)電機(jī)工作方式通過可編程邏輯器件實現(xiàn),如圖 2 所示。電路中的 U2 是一種低價格的通用可編程邏輯器件(GAL),作為步進(jìn)電機(jī)脈沖分配器 ,實現(xiàn)對步進(jìn)電機(jī)的控制, 并且把 AD654 產(chǎn)生的脈沖輸出作為GAL 芯片的時鐘輸入 ,從而實現(xiàn)無級調(diào)速。
在編制GAL 芯片的應(yīng)用程序時 , 定義 3 腳為使能端,用來控制步進(jìn)電機(jī)的啟停 ;定義 5 腳為方向控制端 ,用來控制步進(jìn)電機(jī)正反向運行。因此我們的程序里有兩個控制子程序, 當(dāng) 3 端為高電平輸入時,其中一個子程序啟動 , 輸出的脈沖信號使步進(jìn)電機(jī)正轉(zhuǎn) ,另一個程序啟動時步進(jìn)電機(jī)反轉(zhuǎn)。由于 3 、5腳輸入端只需要普通的高低電位就能實現(xiàn), 同時 AD654 亦能接收計算機(jī)通過數(shù)模轉(zhuǎn)換器發(fā)出的模擬信號 ,因此該控制電路很容易與計算機(jī)控制系統(tǒng)連接 ,實現(xiàn)智能化控制。
如果要實現(xiàn)手動控制, 可外加兩個控制開關(guān) ,實現(xiàn)啟停和方向控制。

16 分析儀器 2002 年第4 期

3 功率放大電路
GAL 產(chǎn)生的脈沖驅(qū)動信號經(jīng)光耦隔離后 , 必須進(jìn)行功率放大, 才能驅(qū)動步進(jìn)電機(jī)。由于恒頻脈寬調(diào)制功率放大電路不但有較好的高頻特性, 而且可有效地減少步進(jìn)電機(jī)的噪聲, 降低功耗, 因此, 在基于步進(jìn)電機(jī)的蠕動泵控制電路中采用了恒頻脈寬調(diào)制功放電路,如圖 3 所示。

圖 3 功率放大電路

需要說明的是 , 利用圖 3 中的電位器 W2 可在一定范圍內(nèi)調(diào)節(jié)步進(jìn)電機(jī)的驅(qū)動力矩, 以適應(yīng)蠕動泵泵管數(shù)量的不同和所需壓力的不同。
4 結(jié)束語
應(yīng)用集成電路 AD654 與可編程邏輯器件設(shè)計的蠕動泵步進(jìn)電機(jī)控制電路 ,具有電路結(jié)構(gòu)簡單、成本低廉、調(diào)試方便的特點,不僅能實現(xiàn)蠕動泵的平穩(wěn)運行 ,而且能進(jìn)行無級調(diào)速。由于具有良好的智能化接口, 為提高流動注射分析系統(tǒng)的測量精度和流動注射分析過程的自動化程度創(chuàng)造了良好條件。